 |
Gbox 4.20
Grow box automation and monitoring - <a href='https://sites.google.com/site/growboxguy/'>https://sites.google.com/site/growboxguy/</a>
|

|
|
Gbox 4.20
Grow box automation and monitoring - <a href='https://sites.google.com/site/growboxguy/'>https://sites.google.com/site/growboxguy/</a>
|
|
Main module for Mega2560 - Grow tent monitoring and controlling sketch. More...
#include "Arduino.h"#include <avr/wdt.h>#include <avr/boot.h>#include <printf.h>#include <TimerThree.h>#include "ELClient.h"#include "ELClientWebServer.h"#include "ELClientCmd.h"#include "ELClientRest.h"#include "ELClientMqtt.h"#include <Thread.h>#include <StaticThreadController.h>#include "SerialLog.h"#include "Settings.h"#include "src/Modules_Web/MainModule_Web.h"#include <SPI.h>#include <RF24.h>
Go to the source code of this file.
Functions | |
| RF24 | Wireless (WirelessCEPin, WirelessCSNPin) |
| Wireless communication with Modules over nRF24L01+. | |
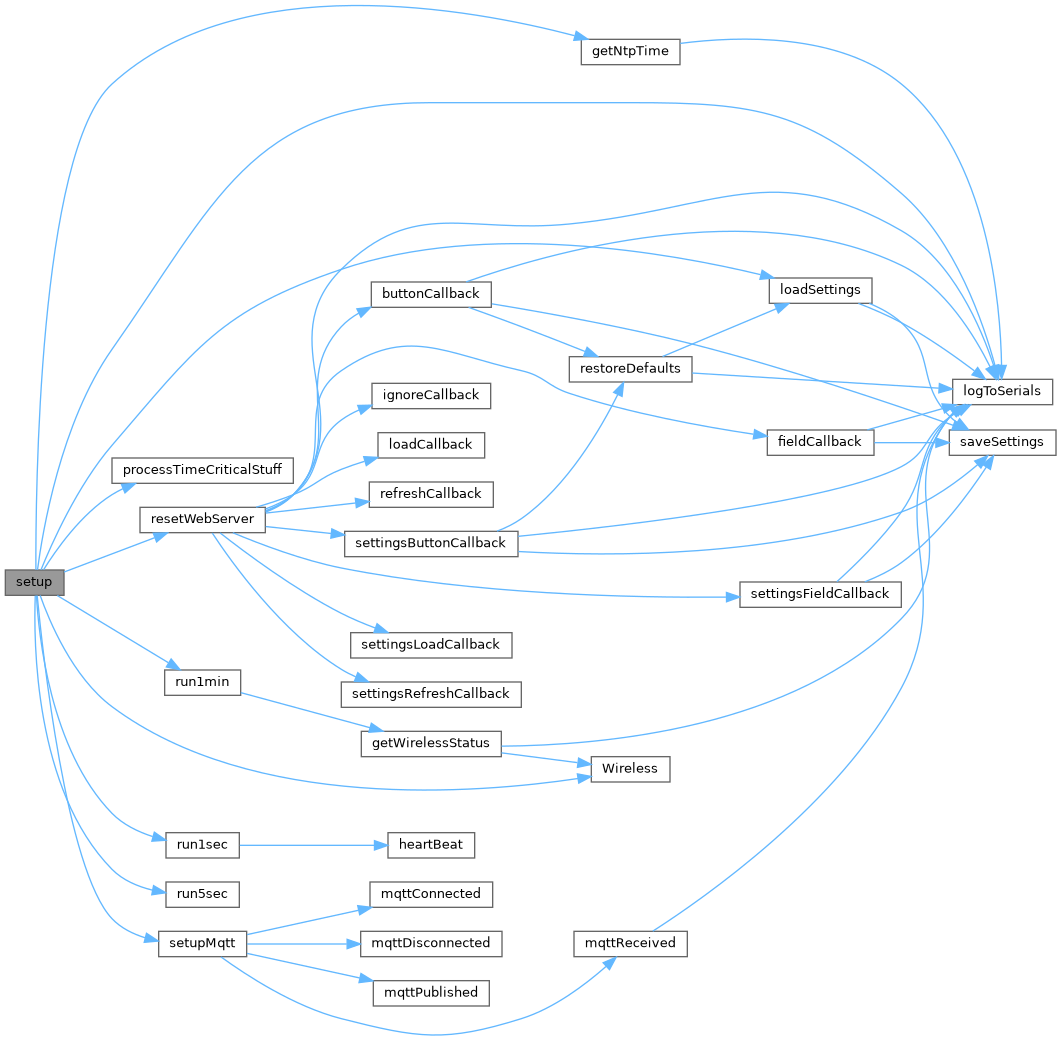
| void | setup () |
| void | loop () |
| void | processTimeCriticalStuff () |
| void | run1sec () |
| void | run5sec () |
| void | run1min () |
| void | heartBeat () |
| Turns the integrated LED on the Arduino board ON/OFF. | |
| void | resetWebServer () |
| (re-)Initialize the ESP-link connection | |
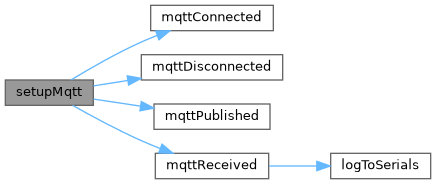
| void | setupMqtt () |
| Sets up the MQTT relay. | |
| void | mqttConnected (__attribute__((unused)) void *response) |
| void | mqttDisconnected (__attribute__((unused)) void *response) |
| void | mqttPublished (__attribute__((unused)) void *response) |
| void | mqttReceived (void *response) |
| time_t | getNtpTime () |
| Update the time over ESP-link using NTP (Network Time Protocol) | |
| void | loadCallback (__attribute__((unused)) char *Url) |
| Called when a website is loading on the ESP-link webserver. | |
| void | refreshCallback (__attribute__((unused)) char *Url) |
| Called when a website is refreshing on the ESP-link webserver. | |
| void | buttonCallback (char *Button) |
| Called when a button is pressed. | |
| void | fieldCallback (char *Field) |
| Called when a field on the website is submitted. | |
| void | settingsLoadCallback (__attribute__((unused)) char *Url) |
| Called when the /Settings.html website is loading on the ESP-link webserver. | |
| void | settingsRefreshCallback (__attribute__((unused)) char *Url) |
| Called when the /Settings.html website is refreshing on the ESP-link webserver. | |
| void | settingsButtonCallback (char *Button) |
| Called when a button is pressed on the /Settings.html web page. | |
| void | settingsFieldCallback (char *Field) |
| Called when a field on the /Settings.html website is submitted. | |
| void | getWirelessStatus () |
| Prints the nRF24L01+ wireless transceiver's status to the Serial log. | |
| void | ignoreCallback (__attribute__((unused)) char *Url) |
| Ignores the incoming load/refresh event. Used when embedding another module's web interface that already handles the event. | |
Variables | |
| char | LongMessage [MaxLongTextLength] = "" |
| Temp storage for assembling long messages (REST API, MQTT reporting, Serial reporting,..etc) | |
| char | ShortMessage [MaxShortTextLength] = "" |
| Temp storage for assembling short text messages (Log entries, Error messages,..etc) | |
| char | CurrentTime [MaxWordLength] = "" |
| Buffer for storing current time in text format. | |
| HardwareSerial & | ArduinoSerial = Serial |
| Reference to the Arduino Serial output : Mega 2560 Rev3 Serial:0(RX) 1(TX) also showed on USB, Serial1:19(RX1) 18(TX1), Serial2:17(RX2), 16(TX2), Serial4:15(RX3) 14(TX3) | |
| HardwareSerial & | ESPSerial = Serial3 |
| Reference to the ESP Link Serial output : Mega 2560 Rev3 Serial:0(RX) 1(TX), Serial1:19(RX1) 18(TX1), Serial2:17(RX2), 16(TX2), Serial4:15(RX3) 14(TX3) | |
| ELClientWebServer WebServer & | ESPLink |
| ESP-link - WebServer API. | |
| Settings * | ModuleSettings |
| This object will store the settings loaded from the EEPROM. Persistent between reboots. | |
| bool & | Debug = *new bool |
| True - Turns on extra debug messages on the Serial Output. | |
| bool & | Metric = *new bool |
| True - Use metric units, False - Use imperial units. | |
| bool | MqttConnected = false |
| Track the connection state to the MQTT broker configured on the ESP-link's REST/MQTT tab. | |
| MainModule * | Main1 |
| Represents a Grow Box with all components (Lights, DHT sensors, Power sensor, Aero/Hempy/Reservoir wireless modules,..etc) | |
| Thread | OneSecThread = Thread() |
| Thread that triggers every second to run the run1sec() function. | |
| Thread | FiveSecThread = Thread() |
| Thread | MinuteThread = Thread() |
Main module for Mega2560 - Grow tent monitoring and controlling sketch.
To change the default pin layout / startup settings navigate to: Settings.h
Definition in file Gbox420_Mega_Main.ino.
| void buttonCallback | ( | char * | Button | ) |
Called when a button is pressed.
| Button | - ID of the button HTML element |
Definition at line 325 of file Gbox420_Mega_Main.ino.


| void fieldCallback | ( | char * | Field | ) |
Called when a field on the website is submitted.
| Field | - Name of the input HTML element |
< Called when any field on the website is updated.
Definition at line 343 of file Gbox420_Mega_Main.ino.

| time_t getNtpTime | ( | ) |
Update the time over ESP-link using NTP (Network Time Protocol)
reset watchdog timeout
Definition at line 267 of file Gbox420_Mega_Main.ino.


| void getWirelessStatus | ( | ) |
Prints the nRF24L01+ wireless transceiver's status to the Serial log.
Definition at line 406 of file Gbox420_Mega_Main.ino.

| void heartBeat | ( | ) |
Turns the integrated LED on the Arduino board ON/OFF.
Definition at line 154 of file Gbox420_Mega_Main.ino.

| void ignoreCallback | ( | __attribute__((unused)) char * | Url | ) |
Ignores the incoming load/refresh event. Used when embedding another module's web interface that already handles the event.
Definition at line 419 of file Gbox420_Mega_Main.ino.

| void loadCallback | ( | __attribute__((unused)) char * | Url | ) |
Called when a website is loading on the ESP-link webserver.
| Url | - HTML filename that is getting loaded |
Definition at line 307 of file Gbox420_Mega_Main.ino.

| void loop | ( | ) |
< loop only checks if it's time to trigger one of the threads (run1sec(), run5sec(),run1min()..etc)
Definition at line 119 of file Gbox420_Mega_Main.ino.
| void mqttConnected | ( | __attribute__((unused)) void * | response | ) |
| void mqttDisconnected | ( | __attribute__((unused)) void * | response | ) |
| void mqttPublished | ( | __attribute__((unused)) void * | response | ) |
| void mqttReceived | ( | void * | response | ) |
Definition at line 245 of file Gbox420_Mega_Main.ino.


| void processTimeCriticalStuff | ( | ) |
< Interrupt calls this every 0.5 sec to process any request coming from the ESP-Link hosted webpage. Uses Serial Line Internet Protocol (SLIP)
Definition at line 124 of file Gbox420_Mega_Main.ino.

| void refreshCallback | ( | __attribute__((unused)) char * | Url | ) |
Called when a website is refreshing on the ESP-link webserver.
| Url | - HTML filename that is refreshinging |
Definition at line 316 of file Gbox420_Mega_Main.ino.

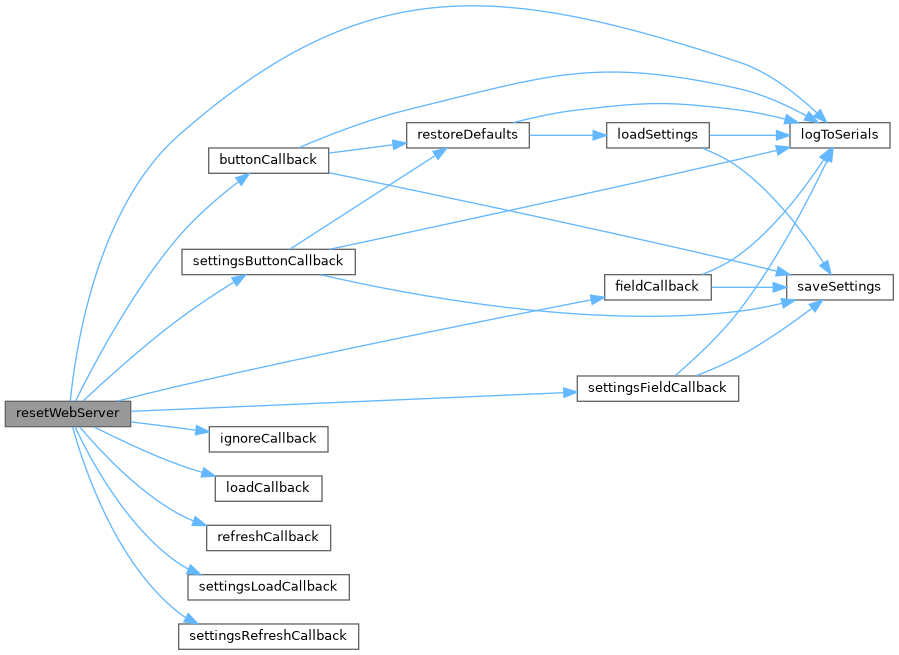
| void resetWebServer | ( | ) |
(re-)Initialize the ESP-link connection
< Callback made from esp-link to notify that it has just come out of a reset
< line break
< Pre-setup PushingBox relay to Google Sheets (Not actual connection)
< If begin returns a negative number the initialization failed
< setup handling request from GrowBox.html
< GrowBox tab - Called then the website loads initially
< GrowBox tab - Called periodically to refresh website content
< GrowBox tab - Called when a button is pressed on the website
< GrowBox tab - Called when a field is changed on the website
< setup handling request from Settings.html
< Settings tab - Called then the website loads initially
< Settings tab - Called periodically to refresh website content
< Settings tab - Called when a button is pressed on the website
< Settings tab - Called when a field is changed on the website
< setup handling request from Hempy.html (embeds the Stand-alone Hempy module's web interface)
< Ignore event, handled by the Stand-alone Hempy module
< Ignore event, handled by the Stand-alone Hempy module
Definition at line 166 of file Gbox420_Mega_Main.ino.

| void run1min | ( | ) |
Definition at line 144 of file Gbox420_Mega_Main.ino.


| void run1sec | ( | ) |
< reset watchdog timeout
< Blinks built-in led
Definition at line 131 of file Gbox420_Mega_Main.ino.


| void run5sec | ( | ) |
| void settingsButtonCallback | ( | char * | Button | ) |
Called when a button is pressed on the /Settings.html web page.
| Button | - ID of the button HTML element |
Definition at line 370 of file Gbox420_Mega_Main.ino.


| void settingsFieldCallback | ( | char * | Field | ) |
Called when a field on the /Settings.html website is submitted.
| Field | - Name of the input HTML element |
Definition at line 392 of file Gbox420_Mega_Main.ino.

| void settingsLoadCallback | ( | __attribute__((unused)) char * | Url | ) |
Called when the /Settings.html website is loading on the ESP-link webserver.
Definition at line 353 of file Gbox420_Mega_Main.ino.

| void settingsRefreshCallback | ( | __attribute__((unused)) char * | Url | ) |
Called when the /Settings.html website is refreshing on the ESP-link webserver.
Definition at line 361 of file Gbox420_Mega_Main.ino.

| void setup | ( | ) |
< Setup code, runs once:
< 2560mega console output
< ESP WiFi console output
< Onboard LED - Heartbeat every second to confirm code is running
< Needed to print wireless status to Serial
< New line
< Logs to both Arduino and ESP serials, adds new line after the text (true), and uses no indentation (0). More on why texts are in F(""): https://gist.github.com/sticilface/e54016485fcccd10950e93ddcd4461a3
< Watchdog timeout set to 8 seconds, if watchdog is not reset every 8 seconds it assumes a lockup and resets the sketch
< fix watchdog not loading sketch after a reset error on Mega2560
< Load settings from EEPROM. If the EEPROM is empty it will be initialized with default settings defined in Settings.h and then loaded to the ModuleSettings object. The settings are stored in a struct format and include all the default values for the different modules (MainModule, AeroModule, HempyModule,..etc) as well as the pin layout for the different components (DHT sensors, Relays,..etc)
< Set the global Debug variable to the value loaded from the EEPROM, turns on/off debug messages on the Serial output
< Set the global Metric variable to the value loaded from the EEPROM, switches between Metric/Imperial units across the sketch
< Callback subscription: What to do when WiFi reconnects
< Reset the WebServer
< Set the function for updating time from NTP server
< Sync time every day
< check every 0.5sec, using a larger interval can cause web requests to time out
< Initialize the nRF24L01+ wireless chip for talking to Modules
< Set the speed to slow - has longer range + No need for faster transmission, Other options: RF24_2MBPS, RF24_1MBPS
< RF24_CRC_8 for 8-bit or RF24_CRC_16 for 16-bit
< RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm, RF24_PA_HIGH=-6dBm, and RF24_PA_MAX=0dBm.
< The number of bytes in the payload. This implementation uses a fixed payload size for all transmissions
< Required for ACK messages
< When sending a wireless package, expect a response confirming the package was received in a custom Acknowledgement package
< Defined in Settings.h. How many retries before giving up sending a single package and How long to wait between each retry
< This is the main object representing an entire Grow Box with all components in it. Receives its name and the settings loaded from the EEPROM as parameters
Definition at line 55 of file Gbox420_Mega_Main.ino.
| void setupMqtt | ( | ) |
Sets up the MQTT relay.
Definition at line 213 of file Gbox420_Mega_Main.ino.

| RF24 Wireless | ( | WirelessCEPin | , |
| WirelessCSNPin | |||
| ) |
Wireless communication with Modules over nRF24L01+.

| HardwareSerial& ArduinoSerial = Serial |
Reference to the Arduino Serial output : Mega 2560 Rev3 Serial:0(RX) 1(TX) also showed on USB, Serial1:19(RX1) 18(TX1), Serial2:17(RX2), 16(TX2), Serial4:15(RX3) 14(TX3)
Printing serial messages to the Arduino Serial output.
Printing serial messages to the Arduino Serial output and the esp-link Microcontroller Console (uC Console)
Definition at line 33 of file Gbox420_Mega_Main.ino.
| char CurrentTime[MaxWordLength] = "" |
Buffer for storing current time in text format.
Definition at line 30 of file Gbox420_Mega_Main.ino.
| bool& Debug = *new bool |
True - Turns on extra debug messages on the Serial Output.
Definition at line 42 of file Gbox420_Mega_Main.ino.
| ELClientMqtt MqttAPI & ESPLink |
ESP-link - WebServer API.
ESP-link - MQTT protocol for sending and receiving messages.
ESP-link - REST API for HomeAssistant.
ESP-link - REST API for PushingBox.
ESP-link - Helps getting the current time from the internet using NTP.
Definition at line 36 of file Gbox420_Mega_Main.ino.
Reference to the ESP Link Serial output : Mega 2560 Rev3 Serial:0(RX) 1(TX), Serial1:19(RX1) 18(TX1), Serial2:17(RX2), 16(TX2), Serial4:15(RX3) 14(TX3)
ESP-link. Both SLIP and debug messages are sent to ESP over the ESP Serial link.
Definition at line 34 of file Gbox420_Mega_Main.ino.
| Thread FiveSecThread = Thread() |
Definition at line 51 of file Gbox420_Mega_Main.ino.
| char LongMessage[MaxLongTextLength] = "" |
Temp storage for assembling long messages (REST API, MQTT reporting, Serial reporting,..etc)
Definition at line 28 of file Gbox420_Mega_Main.ino.
| MainModule* Main1 |
Represents a Grow Box with all components (Lights, DHT sensors, Power sensor, Aero/Hempy/Reservoir wireless modules,..etc)
Definition at line 45 of file Gbox420_Mega_Main.ino.
| bool& Metric = *new bool |
True - Use metric units, False - Use imperial units.
Definition at line 43 of file Gbox420_Mega_Main.ino.
| Thread MinuteThread = Thread() |
Definition at line 52 of file Gbox420_Mega_Main.ino.
| Settings* ModuleSettings |
This object will store the settings loaded from the EEPROM. Persistent between reboots.
Definition at line 41 of file Gbox420_Mega_Main.ino.
| bool MqttConnected = false |
Track the connection state to the MQTT broker configured on the ESP-link's REST/MQTT tab.
Definition at line 44 of file Gbox420_Mega_Main.ino.
| StaticThreadController< 3 > ThreadControl & OneSecThread = Thread() |
Thread that triggers every second to run the run1sec() function.
Controller for managing the three threads above.
Definition at line 50 of file Gbox420_Mega_Main.ino.
| char ShortMessage[MaxShortTextLength] = "" |
Temp storage for assembling short text messages (Log entries, Error messages,..etc)
Definition at line 29 of file Gbox420_Mega_Main.ino.



