|
Gbox 4.20
Grow box automation and monitoring - <a href='https://sites.google.com/site/growboxguy/'>https://sites.google.com/site/growboxguy/</a>
|

|
|
Gbox 4.20
Grow box automation and monitoring - <a href='https://sites.google.com/site/growboxguy/'>https://sites.google.com/site/growboxguy/</a>
|
|
Hempy module for Nano. More...
#include "Arduino.h"#include "avr/wdt.h"#include "avr/boot.h"#include <SPI.h>#include <RF24.h>#include <printf.h>#include "Thread.h"#include "StaticThreadController.h"#include "SerialLog.h"#include "Settings.h"#include "src/Modules/HempyModule.h"#include "src/WirelessCommands_Hempy.h"
Go to the source code of this file.
Functions | |
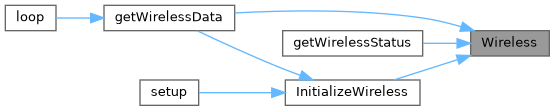
| RF24 | Wireless (WirelessCEPin, WirelessCSNPin) |
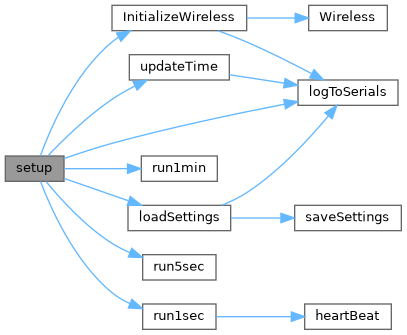
| void | setup () |
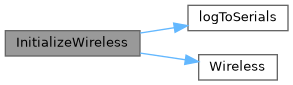
| void | InitializeWireless () |
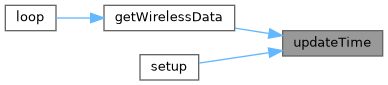
| void | loop () |
| Threads. | |
| void | run1sec () |
| void | run5sec () |
| void | run1min () |
| void | heartBeat () |
| Wireless communication. | |
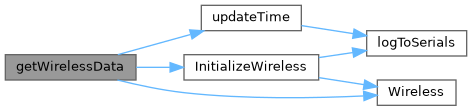
| void | getWirelessData () |
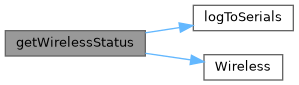
| void | getWirelessStatus () |
| time_t | updateTime () |
Variables | |
| bool & | Debug = *new bool |
| bool & | Metric = *new bool |
| char | LongMessage [MaxLongTextLength] = "" |
| Temp storage for assembling long messages (REST API, MQTT reporting, Serial reporting,..etc) | |
| char | ShortMessage [MaxShortTextLength] = "" |
| Temp storage for assembling short text messages (Log entries, Error messages,..etc) | |
| char | CurrentTime [MaxWordLength] = "" |
| Buffer for storing current time in text format. | |
| uint8_t | ReceivedMessage [WirelessPayloadSize] |
| uint32_t | ReceivedMessageTimestamp = millis() |
| HardwareSerial & | ArduinoSerial = Serial |
| < Component initialization | |
| Settings * | ModuleSettings |
| HempyModule * | HempyMod1 |
| Thread | OneSecThread = Thread() |
| < Thread initialization | |
| Thread | FiveSecThread = Thread() |
| Thread | MinuteThread = Thread() |
Hempy module for Nano.
To change the default pin layout / startup settings navigate to: Settings.h
Runs autonomously on an Arduino RF-Nano or Arduino Nano with an nRF24L01+ wireless transceiver.
Supports wireless data exchange with the Main module
Definition in file Gbox420_Nano_Hempy.ino.
| void getWirelessData | ( | ) |
< Updating internal timer
Definition at line 139 of file Gbox420_Nano_Hempy.ino.

| void getWirelessStatus | ( | ) |
| void heartBeat | ( | ) |
Wireless communication.
Definition at line 130 of file Gbox420_Nano_Hempy.ino.

| void InitializeWireless | ( | ) |
< Set the speed to slow - has longer range + No need for faster transmission, Other options: RF24_2MBPS, RF24_1MBPS
< RF24_CRC_8 for 8-bit or RF24_CRC_16 for 16-bit
< RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm, RF24_PA_HIGH=-6dBm, and RF24_PA_MAX=0dBm.
< The number of bytes in the payload. This implementation uses a fixed payload size for all transmissions
Wireless.enableDynamicPayloads();
< Not necessary, startListening should switch back to normal power mode
< Dump all previously cached but unsent ACK messages from the TX FIFO buffer (Max 3 are saved)
< Dump all previously received messages from the RX FIFO buffer (Max 3 are saved)
< Reset timeout counter
Definition at line 72 of file Gbox420_Nano_Hempy.ino.
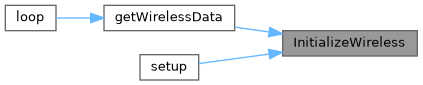
| void loop | ( | ) |
Threads.
< put your main code here, to run repeatedly:
< loop only checks if it's time to trigger one of the threads (run1sec(), run5sec(),run1min()..etc)
< Checks for a control package from the main module
Definition at line 102 of file Gbox420_Nano_Hempy.ino.

| void run1min | ( | ) |
| void run1sec | ( | ) |
< reset watchdog timeout
< Blinks built-in led
Definition at line 110 of file Gbox420_Nano_Hempy.ino.


| void run5sec | ( | ) |
| void setup | ( | ) |
< New line
< logs to the Arduino serial, adds new line after the text (true), and uses no indentation (0). More on why texts are in F(""): https://gist.github.com/sticilface/e54016485fcccd10950e93ddcd4461a3
< Watchdog timeout set to 8 seconds, if watchdog is not reset every 8 seconds it assumes a lockup and resets the sketch
< fix watchdog not loading sketch after a reset error on Mega2560
< Copy a blank command to the memory block pointed ReceivedMessage. Without this ReceivedMessage would contain random data
< Loading settings from EEPROM
< Setting up wireless module
< 1000ms - Setting up how often threads should be triggered and what functions to call when the trigger fires
< This Module contains the watering logic, weight sensors, pump controllers
Definition at line 44 of file Gbox420_Nano_Hempy.ino.
| time_t updateTime | ( | ) |
Definition at line 170 of file Gbox420_Nano_Hempy.ino.

| RF24 Wireless | ( | WirelessCEPin | , |
| WirelessCSNPin | |||
| ) |
| HardwareSerial& ArduinoSerial = Serial |
< Component initialization
Printing serial messages to the Arduino Serial output.
Printing serial messages to the Arduino Serial output and the esp-link Microcontroller Console (uC Console)
Definition at line 33 of file Gbox420_Nano_Hempy.ino.
| char CurrentTime[MaxWordLength] = "" |
Buffer for storing current time in text format.
Definition at line 28 of file Gbox420_Nano_Hempy.ino.
| bool& Debug = *new bool |
Definition at line 24 of file Gbox420_Nano_Hempy.ino.
| Thread FiveSecThread = Thread() |
Definition at line 40 of file Gbox420_Nano_Hempy.ino.
| HempyModule* HempyMod1 |
Definition at line 35 of file Gbox420_Nano_Hempy.ino.
| char LongMessage[MaxLongTextLength] = "" |
Temp storage for assembling long messages (REST API, MQTT reporting, Serial reporting,..etc)
Definition at line 26 of file Gbox420_Nano_Hempy.ino.
| bool& Metric = *new bool |
Definition at line 25 of file Gbox420_Nano_Hempy.ino.
| Thread MinuteThread = Thread() |
Definition at line 41 of file Gbox420_Nano_Hempy.ino.
| Settings* ModuleSettings |
Definition at line 34 of file Gbox420_Nano_Hempy.ino.
| StaticThreadController<3> ThreadControl& OneSecThread = Thread() |
< Thread initialization
Definition at line 39 of file Gbox420_Nano_Hempy.ino.
| uint8_t ReceivedMessage[WirelessPayloadSize] |
Definition at line 29 of file Gbox420_Nano_Hempy.ino.
| uint32_t ReceivedMessageTimestamp = millis() |
Definition at line 30 of file Gbox420_Nano_Hempy.ino.
| char ShortMessage[MaxShortTextLength] = "" |
Temp storage for assembling short text messages (Log entries, Error messages,..etc)
Definition at line 27 of file Gbox420_Nano_Hempy.ino.